Gids voor het gebruik van PIC16F877A voor stappenmotorprojecten
De PIC16F877A -microcontroller wordt veel gebruikt in veel elektronische projecten omdat het een goede balans van functies en gebruiksgemak biedt.In deze gids zullen we de PIC16F877A van dichtbij bekijken, die alles bedekken, van de Pinout- en CAD -modellen tot het gebruik ervan bij het beheersen van stappenmotoren.Of u nu een eenvoudig apparaat of een complex automatiseringsproject bouwt, het begrijpen en bedienen van motoren met behulp van deze microcontroller zal u helpen de beste resultaten te krijgen.
Catalogus

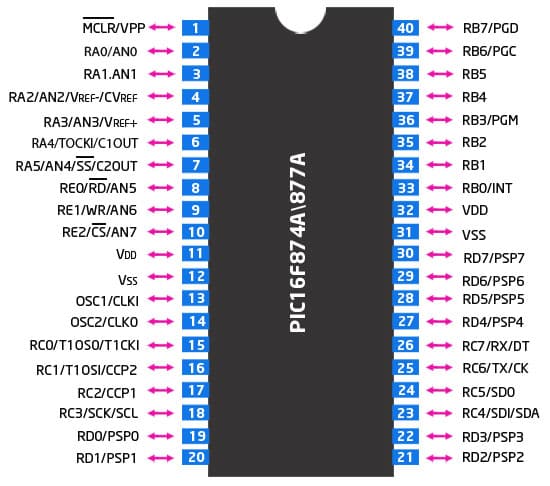
PIC16F877A PIN -configuratie
CAD -modellen voor PIC16F877A
PIC16F877A -diagramsymbool
PIC16F877A PCB -voetafdruk

3D -model
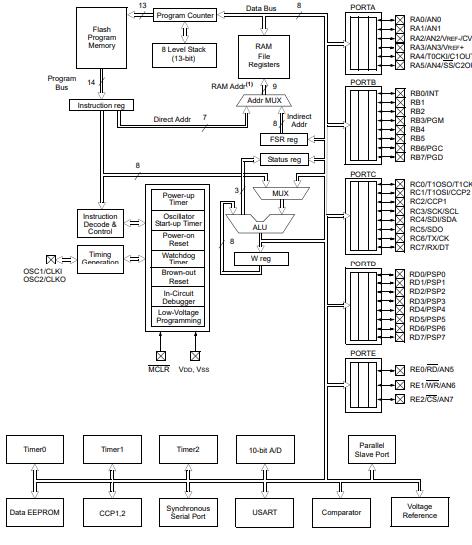
PIC16F877A Interne structuur
Gedetailleerde technische specificaties
| Type | Parameter |
| Factory doorlooptijd | 7 weken |
| Inzetten | Door gat |
| Montagetype | Door gat |
| Pakket / kast | 40-dip (0.600, 15,24 mm) |
| Aantal pinnen | 40 |
| Gegevensconverters | A/D 8x10b |
| Aantal I/OS | 33 |
| Waakhond timers | Ja |
| Bedrijfstemperatuur | -40°C ~ 85°C TA |
| Verpakking | Buis |
| Serie | Pic® 16f |
| Gepubliceerd | 1997 |
| JESD-609 Code | E3 |
| PBFree -code | Ja |
| Onderdeelstatus | Actief |
| Vochtgevoeligheidsniveau (MSL) | 1 (onbeperkt) |
| Aantal beëindigingen | 40 |
| ECCN -code | EAR99 |
| Eindafwerking | Mat tin (sn) - gegloeid |
| Aanvullende functie | Werkt op een minimumaanbod van 4V |
| Eindpositie | Dual |
| Voedingsspanning | 5V |
| Frequentie | 20MHz |
| Basisonderdeelnummer | PIC16F877A |
| Telling | 40 |
| Supply Voltage-Max (VSUP) | 5.5V |
| Voedingsvoorraden | 5V |
| Voedingsspanning-min (VSUP) | 4.5V |
| Interface | I2C, SPI, SSP, UART, USART |
| Geheugengrootte | 14KB |
| Oscillatortype | Extern |
| Nominale voedingsstroom | 1.6MA |
| RAM -maat | 368 x 8 |
| Spanning - Supply (VCC/VDD) | 4v ~ 5.5V |
| UPS/UCS/perifeer ICS -type | Microcontroller, RISC |
| Kernprocessor | Pic |
| Randapparatuur | Brown-Out Detect/Reset, Por, PWM, WDT |
| Programma -geheugentype | FLASH |
| Kerngrootte | 8-bit |
| Programma -geheugengrootte | 14KB (8k x 14) |
| Connectiviteit | I2c, spi, uart/usart |
| Bit -maat | 8 |
| Toegangstijd | 20 µS |
| Heeft ADC | Ja |
| DMA -kanalen | Nee |
| Gegevensbusbreedte | 8B |
| Aantal timers/tellers | 3 |
| Adres busbreedte | 8B |
| Dikte | 112 kb |
| EEPROM -maat | 256 x 8 |
| CPU -familie | Pic |
| Aantal ADC -kanalen | 8 |
| Aantal PWM -kanalen | 2 |
| Aantal I2C -kanalen | 1 |
| Hoogte | 4,06 mm |
| Lengte | 52.45 mm |
| Breedte | 14.22 mm |
| Bereik SVHC | Geen SVHC |
| Stralingsharding | Nee |
| ROHS -status | ROHS3 -compatibel |
| Leid gratis | Leid gratis |
Stappermotoren begrijpen
Een stappenmotor is een type elektrische motor die in specifieke stappen beweegt in plaats van in continue beweging zoals traditionele motoren.Deze stapsgewijze bewegingen worden gemeten in graden, die kunnen variëren afhankelijk van de toepassing.
Stappermotoren kunnen in verschillende modi werken: golfaandrijving, volledige aandrijving en halve drive.Elke modus regelt hoe de motorfasen worden bekrachtigd, waardoor de prestaties van invloed zijn en het geschikt maakt voor verschillende toepassingen.
In de golfaandrijfmodus wordt slechts één fase van de motor tegelijk aangedreven.Deze eenvoudige besturingsmodus is nuttig voor situaties waarin stroomefficiëntie prioriteit krijgt boven het koppel, zoals bij basisautomatiseringstaken waarbij minimale startstroom nodig is.
Volledige aandrijfmodus voedt twee fasen tegelijkertijd.Dit resulteert in een hogere koppeloutput naarmate twee spoelen samenwerken, waardoor het ideaal is voor toepassingen waar precisie en sterkte nodig zijn, zoals in robotica en CNC -machines.
Halve aandrijfmodus combineert de kenmerken van zowel golf als volledige aandrijving door afwisselend een fase en twee fasen te stimuleren.Deze aanpak biedt kleinere stapgroottes en verdubbelt de resolutie van de motor effectief.Half Drive is het meest geschikt voor toepassingen zoals 3D -printen en fijne instrumentatie, waarbij soepele beweging en precieze positionering essentieel zijn.
Overweeg bij het kiezen van een steppermotor voor een specifiek gebruik de bedrijfsomgeving.Voor taken met een hoge precisie wordt de halve aandrijfmodus aanbevolen om soepele overgangen en verminderde trillingen te garanderen.Voor projecten die gericht zijn op energiebesparingen, kan de Wave Drive -modus beter geschikte zijn.
Het selecteren van de juiste modus vereist evenwichtsfactoren zoals koppel, snelheid en systeemcomplexiteit.Het kiezen van de juiste modus kan de prestaties van de motor en de algehele efficiëntie van uw systeem aanzienlijk beïnvloeden.
Een steppermotor aansluiten met PIC16F877A
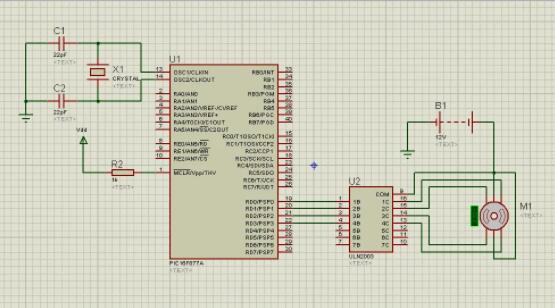
Om een steppermotor aan te sluiten met een PIC16F877A Microcontroller, u kunt de ULN2003 -transistorarray gebruiken.Dit geïntegreerde circuit, ontworpen voor high-torque motoren, bevat zeven Darlington-paren.De lagere PORTD -bits van de microcontroller zijn gekoppeld aan de invoerpennen (1B, 2B, 3B, 4B) van de ULN2003, terwijl de uitgangspinnen (1C, 2C, 3C, 4C, 4C) verbinden met de pinnen van de stappenmotor.De gemeenschappelijke pennen van de motor en de COM -pin van de ULN2003 zijn verbonden met een 12V -voeding.
Stappermotoren worden vaak gebruikt voor toepassingen die nauwkeurige bewegingscontrole vereisen.Ze zetten digitale pulsen om in mechanische rotatie, waardoor ze ideaal zijn voor apparaten zoals CNC -machines en 3D -printers, waar positie en snelheid zorgvuldig moeten worden gereguleerd.
De ULN2003 speelt een sleutelrol bij het beheersen van stappenmotoren vanwege het vermogen om hoge stroom aan te pakken en zijn eenvoudige interface met microcontrollers.Wanneer aangesloten op de PIC16F877A, worden de onderste PORTD -bits gebruikt om de stappenmotor te regelen.Deze configuratie biedt precieze stapcontrole en zorgt voor een nauwkeurige beweging en positionering.
Het gebruik van de ULN2003 in motorbesturingsinstellingen is zeer betrouwbaar in real-world applicaties.Het helpt bij het minimaliseren van problemen zoals gemiste stappen of onjuiste positionering, waardoor de algehele prestaties worden verbeterd.Regelmatig onderhoud en kalibratie op basis van gebruiksgegevens kunnen de motorfunctie verder optimaliseren, waardoor de stabiliteit op de lange termijn en een precieze werking wordt gewaarborgd.
Stappermotorsnelheid aanpassen
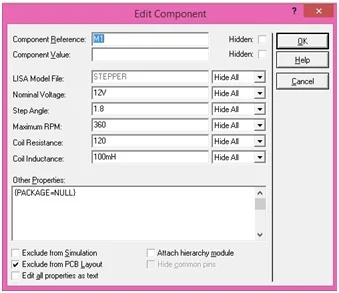
Stappermotorsnelheid kan nauwkeurig worden gewijzigd met behulp van proteus simulatiesoftware.Door toegang te krijgen tot de instellingen van de motor via 'Eigenschappen bewerken', kunnen aanpassingen aan parameters zoals het aantal stappen en de staphoek worden gemaakt.Een motor van 200 stappen splitst bijvoorbeeld een volledige rotatie (360 °) in 200 stappen, waardoor elke stap 1,8 ° wordt weergegeven.Het wijzigen van deze instellingen in Proteus zal dynamisch weerspiegelen tijdens de simulatie.
In de praktijk worden stappenmotoren vaak gebruikt in industrieën waar precieze controle over beweging cruciaal is, zoals in CNC -machines en robotica.Het aanpassen van de staphoek en het aantal stappen verfijnt de motor om de exacte beweging te bereiken die nodig is voor specifieke taken.
Het wijzigen van stappenmotorparameters beïnvloedt prestatiekenmerken zoals koppel en resolutie.Het verhogen van het aantal stappen verhoogt bijvoorbeeld in het algemeen de resolutie, maar kan het koppel en de responstijd beïnvloeden.Het begrijpen van deze afwegingen door simulatie helpt bij het nemen van geïnformeerde beslissingen.
Een genuanceerd perspectief onthult dat iteratieve aanpassingen, gevolgd door praktische proeven, leiden tot een robuuster motorontwerp.Het is van cruciaal belang om ervoor te zorgen dat digitale simulaties nauwkeurig weerspiegelen.De nuances om een steppermotor te configureren liggen inderdaad in het vinden van een evenwicht tussen theoretische precisie en praktische haalbaarheid.
Een steppermotor programmeren met PIC16F877A
In dit gedeelte wordt behandeld hoe u een steppermotor kunt programmeren met behulp van de PIC16F877A -microcontroller, die verschillende rijmodi uitlegt en praktische richtlijnen biedt voor een effectieve implementatie.
Hier is een basisvoorbeeldcode om Stepper Motor Control te demonstreren met behulp van de volledige aandrijfmodus:
void main ()
{
Trisd = 0B00000000;// Stel PORTD in als uitvoer
PORTD = 0B11111111;// Initialiseer portd
Doen
{
PORTD = 0B00000011;// bekrachtig twee fasen tegelijkertijd
Vertraging_ms (500);// vertraging van 0,5 seconden
PORTD = 0B00000110;
Vertraging_ms (500);
PORTD = 0B00001100;
Vertraging_ms (500);
PORTD = 0B00001001;
Vertraging_ms (500);
} terwijl (1);// Loop voor onbepaalde tijd
}
In deze code is de portd van de PIC16F877A geconfigureerd als een uitvoerpoort om de stappenmotor te regelen via het ULN2003 -stuurprogramma.De volgorde van opdrachten geeft twee fasen van de steppermotor tegelijkertijd van energie, wat kenmerkend is voor de volledige aandrijfmodus.Deze modus houdt de rotor in een vaste positie met maximaal koppel, maar verbruikt meestal meer vermogen.
Volledige aandrijfmodus is niet de enige manier om Stepper -motoren te besturen.Wave Drive en Half Drive -modi bieden alternatieven op basis van specifieke vereisten.Wave Drive energie geeft slechts één fase tegelijkertijd, wat het stroomverbruik vermindert maar resulteert in een lager koppel.Half Drive wisselt zich af tussen een en twee fasen en biedt een hogere resolutie en soepelere beweging.
Wanneer u stappermotoren programmeert, kiest u de rijmodus die het beste bij uw behoeften past, of het nu gaat om nauwkeurige positionering, stroomefficiëntie of maximumkoppel.
Praktische toepassingen van stepper -motoren
Stappermotoren worden veel gebruikt in veel industrieën vanwege hun vermogen om precieze controle en betrouwbare prestaties te bieden.Hun veelzijdigheid maakt ze geschikt voor alles, van auto's en huishoudelijke apparaten tot industriële machines en medische hulpmiddelen.
In de autowereld spelen stappenmotoren een sleutelrol bij het beheersen van systemen zoals de gasklep, koplampen en airconditioning.Ze helpen deze componenten te verfijnen en zorgen ervoor dat voertuigen soepel en efficiënt lopen.Ondertussen, in kantoorapparatuur zoals printers en fotokopieën, behandelen steppermotoren taken zoals papieren voeding en inktplaatsing.Deze precisie zorgt voor consistente printkwaliteit en een soepele werking in de loop van de tijd.
Thuis vertrouwen apparaten zoals wasmachines en vaatwassers op stepper -motoren om waterstroom en trommelrotatie te regelen, waardoor alles naadloos functioneert.In industriële omgevingen zijn stappenmotoren cruciaal voor het bedienen van CNC-machines en robotarmen, waar ze de exacte bewegingen bieden die nodig zijn voor de productie van een zeer nauwkeurige productie.
Beveiligingssystemen profiteren ook van de betrouwbare beweging van stepper -motoren.In apparaten zoals bewakingscamera's en geautomatiseerde sloten zorgen stappenmotoren voor soepele en nauwkeurige positionering, wat essentieel is voor effectieve monitoring en beveiliging.In de gezondheidszorg worden stappenmotoren gebruikt in medische hulpmiddelen zoals infusiepompen en beeldvormingsapparatuur, waar ze de precieze controle bieden die nodig is voor een veilige en nauwkeurige werking.
Naarmate de technologie blijft evolueren, wordt verwacht dat Stepper Motors nog meer toepassingen vinden in opkomende velden zoals robotica en autonome voertuigen.Hun voortdurende ontwikkeling zal waarschijnlijk leiden tot een nog grotere precisie en efficiëntie, waardoor hun rol in verschillende industrieën wordt uitgebreid.
Vergelijkbare microcontroller -onderdelen
| Onderdeelnummer | PIC16F877A-I/P | PIC16F77-I/P | PIC16F74-I/P | PIC16F777-I/P |
| Fabrikant | Microchip -technologie | Microchip -technologie | Microchip -technologie | Microchip -technologie |
| Pakket / kast | 40-dip (0.600, 15,24 mm) | 40-dip (0.600, 15,24 mm) | 40-dip (0.600, 15,24 mm) | 40-dip (0.600, 15,24 mm) |
| Aantal pinnen | 40 | 40 | 40 | 40 |
| Gegevensbusbreedte | 8 B | 8 B | 8 B | 8 B |
| Aantal I/O | 33 | 33 | 33 | 36 |
| Interface | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2C, SPI, SSP, UART, USART | I2c, spi, uart, usart |
| Geheugengrootte | 14 kb | 7 kb | 14 kb | 14 kb |
| Voedingsspanning | 5 V | 5 V | 5 V | 5 V |
| Randapparatuur | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT | Brown-Out Detect/Reset, Por, PWM, WDT |
| Bekijk vergelijken | PIC16F877A-I/P Vs PIC16F77-I/P | PIC16F877A-I/P Vs PIC16F77-I/P | PIC16F877A-I/P Vs PIC16F74-I/P | PIC16F877A-I/P Vs PIC16F777-I/P |
Veelgestelde vragen [FAQ]
1. Wat gebruikt een steppermotor om mechanische beweging te genereren?
Een stappenmotor genereert mechanische beweging met behulp van elektrische pulsen.
2. Wat doet een steppermotor?
Een steppermotor beweegt in discrete stappen.
3. Hoe worden steppermotoren gemeten?
Stappermotoren worden in graden gemeten.
4. Hoeveel stappen neemt een steppermotor?
Een steppermotor beweegt stap voor stap.
5. Hoeveel excitatiemodi heeft een steppermotor?
Een steppermotor heeft drie excitatiemodi.
6. Wat is de eenvoudigste manier om een steppermotor aan te sluiten?
De eenvoudigste manier is om het aan te sluiten op een PIC16F877A -microcontroller.
7. Hoeveel invoerpennen van de ULN2003 zijn verbonden met de laagste significante bits van de PORTD van de microcontroller?
Vier invoerpennen zijn verbonden met de laagste significante bits van de PORTD van de microcontroller
Over ons
ALLELCO LIMITED
Lees verder
Quick Inviry
Stuur een aanvraag, we zullen onmiddellijk reageren.
Waarom kiezen voor de ADESTO RM25C64DS-LTAI-B Memory Chip voor uw project?
Op 2024/10/10
PC817 OptoCoupler: functionaliteit en moderne toepassingen
Op 2024/10/10
Populaire berichten
-

Wat is GND in het circuit?
Op 1970/01/1 2838
-

RJ-45 Connectorhandleiding: RJ-45 Connector kleurcodes, bedradingsschema's, R-J45-applicaties, RJ-45 datasheets
Op 1970/01/1 2410
-

Vezelconnectortypen: SC versus LC en LC vs MTP
Op 1970/01/1 2023
-
Inzicht in de voedingsspanningen in elektronica VCC, VDD, VEE, VSS en GND
Op 0400/11/5 1768
-

Vergelijking tussen DB9 en RS232
Op 1970/01/1 1730
-

Wat is een LR44 -batterij?
Elektriciteit, die alomtegenwoordige kracht, doordringt stilletjes elk aspect van ons dagelijks leven, van triviale gadgets tot levensbedreigende medische apparatuur, het speelt een stille rol.Het is echter geen gemakkelijke taak om deze energie echt te begrijpen, vooral hoe deze op te slaan en efficiënt uit te voeren.Het is tegen deze achtergrond dat dit artikel zich zal concentreren op een type...Op 1970/01/1 1681
-
Inzicht in de basisprincipes: inductantieweerstand en capaciteit
In de ingewikkelde dans van elektrotechniek staat een trio van fundamentele elementen centraal: inductantie, weerstand en capaciteit.Elk draagt unieke eigenschappen die de dynamische ritmes van elektronische circuits bepalen.Hier beginnen we aan een reis om de complexiteit van deze componenten te ontcijferen, om hun verschillende rollen en praktische toepassingen binnen het enorme elektrische ...Op 1970/01/1 1628
-

CR2430 Batterij uitgebreide gids: specificaties, toepassingen en vergelijking met CR2032 -batterijen
Wat is CR2430 -batterij?Voordelen van CR2430 -batterijenNormCR2430 -batterijtoepassingenCR2430 equivalentCR2430 vs CR2032Batterij CR2430 maatWaar moet u op letten bij het kopen van de CR2430 en equivalentenGegevensblad PDFVeelgestelde vragen Batterijen zijn het hart van kleine elektronische apparaten.Onder de vele beschikbare typen spelen muntencellen een cruciale rol, vaak aangetroffen in rekenma...Op 1970/01/1 1497
-

CR2450 vs CR2032: Kan de batterij in plaats daarvan worden gebruikt?
Lithium mangaanbatterijen hebben enkele overeenkomsten met andere lithiumbatterijen.Hoge energiedichtheid en lange levensduur zijn de kenmerken die ze gemeen hebben.Dit soort batterij heeft het vertrouwen en de gunst van veel consumenten gewonnen vanwege de unieke veiligheid.Dure technische gadgets?Kleine apparaten in ons huizen?Kijk rond en je zult ze overal zien.Onder deze vele lithium-manganese...Op 1970/01/1 1471
-
Wat is RF en waarom gebruiken we het?
Radiofrequentie (RF) -technologie is een belangrijk onderdeel van moderne draadloze communicatie, waardoor gegevensoverdracht over lange afstanden mogelijk maakt zonder fysieke verbindingen.Dit artikel duikt in de basis van RF, waarin wordt uitgelegd hoe elektromagnetische straling (EMR) RF -communicatie mogelijk maakt.We zullen de principes van EMR, de creatie en controle van RF-signalen en hun b...Op 1970/01/1 1455
Heet onderdeelnummer
-

LQW2BHN47NG03L
Murata Electronics
FIXED IND 47NH 450MA 230MOHM SMD
SPL505YC256BTT
Skyworks Solutions Inc.
IC CLOCK CK505 BEARLAKE 56TSSOP
12061A561KAT4A
KYOCERA AVX
CAP CER 560PF 100V C0G/NP0 1206
INA225AIDGKR
Texas Instruments
IC CURRENT MONITOR 8VSSOP
MHQ1005P5N1ST000
TDK Corporation
FIXED IND 5.1NH 800MA 120MOHM SM
MPC942PFA
NXP USA Inc.
IC CLOCK DISTRIB LV 1:18 32-LQFP
RN232-0.6-02
Schaffner EMC Inc.
COMMON MODE CHOKE 47MH 600MA
145805020000829+
KYOCERA AVX
BOARD TO BOARD
GRM55R5C1H203JD01L
Murata Electronics
CAP CER 0.02UF 50V C0G/NP0 2220
DSD1702E/2K
Texas Instruments
IC DAC/AUDIO 24BIT 200K 20SSOP
MOC3052SR2VM
onsemi
OPTOISOLATOR 4.17KV TRIAC 6SMD
UMK105CG020CVHF
Taiyo Yuden
CAP CER 2PF 50V C0G/NP0 0402
FAN4800ASMY
onsemi
IC PFC CTR AV CURR 268KHZ 16SOP
LT1807CMS8#PBF
Analog Devices Inc.
IC OPAMP GP 2 CIRCUIT 8MSOP
BZX85C8V2
Taiwan Semiconductor Corporation
DO-204AL (DO-41), 1300MW, 5%, SM
REF193GS
Analog Devices Inc.
IC VREF SERIES PREC 3V 8-SOIC
NJM2211M-TE2
Nisshinbo Micro Devices Inc.
IC FSK DEMOD/TONE DECODE BIPO 14
M61538FP#DF0G
Renesas Electronics America Inc
AUDIO CONTROL IC, PDSO24 -

ZL2008EALAFT1
Renesas Electronics America Inc
IC AMP CLASS
744227
Würth Elektronik
CMC 51UH 1A 2LN 5.5K OHM SMD
IRL540PBF
Vishay Siliconix
MOSFET N-CH 100V 28A TO220AB
STM32F091RCT6TR
STMicroelectronics
IC MCU 32BIT 256KB FLASH 64LQFP
P6KE150CA
SMC Diode Solutions
TVS DIODE 128VWM 207VC DO15
MPC8533EVTAQGA
Freescale Semiconductor
POWERQUICC RISC MICROPROCESSOR,
IS25LQ020A-JNLE
ISSI, Integrated Silicon Solution Inc
IC FLASH 2MBIT SPI/QUAD 8SOIC
S29GL064N90TFA043
Infineon Technologies
IC FLASH 64MBIT PARALLEL 48TSOP
PCS3P7303AG-08CR
onsemi
IC CLK EMI REDUCTION FREQ 8WDFN
PTH05020WAZT
Artesyn Embedded Power
DC DC CONVERTER 0.8-3.6V 79W
RGP10M-M3/54
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 1KV 1A DO204AL
MB91F376GPMCR-GS
Infineon Technologies
IC MCU 32BIT 768KB FLASH 120LQFP
GMK212SD153JD-T
Taiyo Yuden
CAP CER 0.015UF 35V 0805
TPS61310YFFR
Texas Instruments
IC LED DRV RGLTR PWM 20DSBGA
SI4741-C10-GMR
Skyworks Solutions Inc.
RF RX AM/FM 153KHZ-279KHZ 24QFN
ADM8320WBX3NARJZR7
Analog Devices Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5
B0540W
Taiwan Semiconductor Corporation
SOD-123, 40V, 0.5A, SCHOTTKY DIO
T627082054DN
Powerex Inc.
SCR 800V 315A T62 -

HCPL-2730-000E
Broadcom Limited
OPTOISO 3.75KV 2CH DARLNG 8-DIP
EP2AGZ225FF35C3N
Intel
IC FPGA 554 I/O 1152FBGA
HIP6302VCB
Intersil
SWITCHING CONTROLLER
KSZ9031MNXIA
Microchip Technology
IC TRANSCEIVER FULL 4/4 64QFN
C0603C0G1E5R6C030BG
TDK Corporation
CAP CER 5.6PF 25V C0G 0201
IRS2005STRPBF
Infineon Technologies
IC GATE DRVR HALF-BRIDGE 8SOIC
UPA653TT-E1-A
Renesas Electronics America Inc
MOSFET P-CH 30V 2.5A 6WSOF
NJU7024D
Nisshinbo Micro Devices Inc.
IC CMOS 4 CIRCUIT 14DIP
SMBJ110CA
Bourns Inc.
TVS DIODE 110VWM 177VC SMB
XC74UL14AAMR
Torex Semiconductor Ltd
IC INVERT SCHMITT 1CH 1-IN SOT26
KA358STU
onsemi
IC OPAMP GP 2 CIRCUIT 9SIP
DMT6016LPS-13
Diodes Incorporated
MOSFET N-CH 60V 10.6A PWRDI5060
V48MLA1210H
Littelfuse Inc.
VARISTOR 60.5V 250A 1210
TRSF3232EIPW
Texas Instruments
IC TRANSCEIVER FULL 2/2 16TSSOP
AD7721AN
Analog Devices Inc.
IC ADC 16BIT SIGMA-DELTA 28-DIP
SY100E222LTY
Microchip Technology
IC CLOCK GENERATOR 52LQFP
FSUSB22MTCX
onsemi
IC USB SWITCH QUAD 2X1 16TSSOP
SN74AUP2G08DQER
Texas Instruments
IC GATE AND 2CH 2-INP 8X2SON