TB6600HG STEPPER MOTOR Driver: specificaties, functies en toepassingen
Catalogus
TB6600HG Beschrijving

TB6600HG is een PWM Chopper-type single-chip bipolaire sinusvormige microsteppingmotor driver.Het kan voorwaartse en omgekeerde rotatiecontrole bereiken door 2-fase, 1-2 fase, W1-2-fase, 2W1-2-fase en 4W1-2-fase excitatiemodi.2-fase bipolaire stappenmotoren worden uitsluitend aangedreven door een laag-tribratie, hoogtreffend kloksignaal.
Alternatieven en equivalenten:
• TB6600FG
• L6258EX
Specificaties van TB6600HG
• Deelstatus: actief
• Verpakking: lade
• Pakket / behuizing: HZIP-25
• Fabrikant: Toshiba
• Bedrijfsvoorziening Stroom: 4,2 MA
• Bedrijfsvoorzieningsspanning: 2 V tot 5,5 V
• Laadspanningsclassificatie: 8 V tot 42 V
• Aantal uitgangen: 2 uitgangen
• PD - Power Dissipation: 40 W
• Montagestijl: door gat
• Pakketlengte/breedte/hoogte: 29,3 mm (max) /4,5 mm/15.7 mm
• Productcategorie: Motor / Motion / Ignition Controllers & Drivers
Bedrijfsomstandigheden van TB6600HG
(TA = -30 ° C tot 85 ° C)
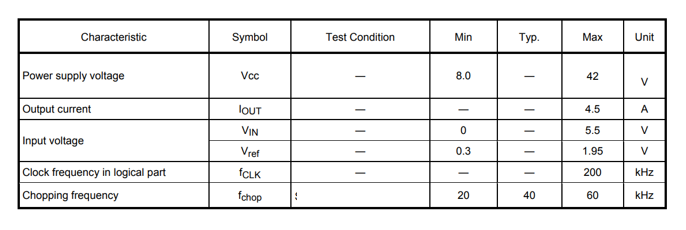
Opmerking: twee VCC -terminals moeten dezelfde spanning worden geprogrammeerd.De maximale stroom van het werkbereik kan niet noodzakelijkerwijs worden uitgevoerd, afhankelijk van verschillende omstandigheden, omdat de uitgangsstroom wordt beperkt door de Power Dissipation PD.Zorg ervoor dat u de IC vermijdt in de aandoening waardoor de temperatuur de TJ zou overschrijden (Avg.) = 107 ° C.
De voedingspanning van 42 V en de uitgangsstroom van 4,5 A zijn de maximale waarden van het werkbereik.Ontwerp het circuit met voldoende afgeleid binnen dit bereik door de variatie van de voeding, de externe weerstand en de elektrische kenmerken van de IC te overwegen.In het geval van het overschrijden van de voedingsspanning van 42 V en de uitgangsstroom van 4,5 A, werkt de IC niet normaal.
Hoe verbindt u TB6600HG met het besturingssysteem?
Power Connection: zorg eerst dat u de juiste voeding biedt tot TB6600HG.Wanneer u TB6600HG aandrijft, moet u meestal twee pennen aansluiten: VCC (positieve voeding) en GND (gronddraad).De VCC -pin is verantwoordelijk voor het verstrekken van de spanning die nodig is om de chip aan te sturen, terwijl de GND -pin dient als referentie maaiveld.We moeten ervoor zorgen dat de voeding stabiel is en voldoet aan de specificaties van de TB6600HG.
Signaalverbinding: Volgens de specifieke behoeften van het besturingssysteem moeten we het besturingssignaal aansluiten op de overeenkomstige pin van de chip van de TB6600HG -driver.Deze besturingssignalen omvatten meestal richtingsregelsignalen en stappenpulssignalen, enz., Die verantwoordelijk zijn voor het instrueren van hoe de motor werkt, inclusief de rotatierichting en de rotatiesnelheid.
Motorische verbinding: we moeten bijzonder voorzichtig zijn bij het aansluiten van de motor op de TB6600HG -stuurprogramma -chip.De twee draden van de motor, meestal rood en zwart, vertegenwoordigen respectievelijk de positieve en negatieve polen van de motor.De rode draad verbindt meestal met de positieve terminal van de motor, terwijl de zwarte draad verbinding maakt met de negatieve terminal.
Feedbackverbinding (optioneel): als een encoder wordt gebruikt voor feedbackregeling, moeten we ook het uitgangssignaal van de encoder verbinden met het besturingssysteem.Dit omvat meestal de uitgangen van fase A, fase B en fase Z (indien beschikbaar).
Aarding: we moeten ervoor zorgen dat de gemeenschappelijke gronddraad van alle apparatuur correct is verbonden om interferentie en schade te voorkomen.
Initialisatie -instellingen: nadat de verbinding is voltooid, moeten we de instellingen van de TB6600HG initialiseren om ervoor te zorgen dat deze correct werkt.Dit kan het instellen van huidige limieten, stappenmodi, enz. Omvatten
TB6600HG Productfuncties
• Neem een vergrote radiator aan voor goede warmte -dissipatie
• Instructies voor onderverdelingsinstellingen worden op de achterkant van het bord afgedrukt
• Met de beveiligingsfunctie van de uitvoer kortsluiting, zorgeloos gebruik
• Neem 6N137 optische koppeling met hoge snelheid aan om een hoge snelheid te garanderen zonder verlies van synchronisatie
• Uitgangsstroom is stiploos verstelbaar om aan uw verschillende applicatiebehoeften te voldoen
• Met behulp van een gemeenschappelijke anode -invoermodus zijn er twee invoeraansluitingen, waardoor bedrading handiger is
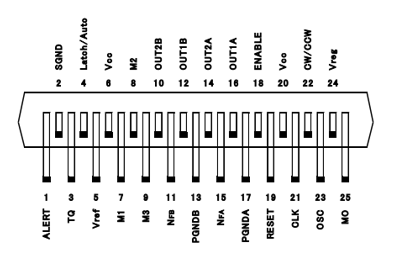
PIN -configuratie van TB6600HG
Functiebeschrijving van TB6600HG
Excitatie -instellingen
De excitatiemodus kan worden geselecteerd uit de volgende acht modi met behulp van de M1-, M2- en M3 -ingangen.Wanneer M1-, M2- of M3 -ingangen worden verschoven tijdens de werking van de motor, wordt een nieuwe excitatiemodus geïnitieerd vanuit de initiële modus, waardoor de continuïteit van de uitgangsstroomgolfvorm mogelijk wordt verstoord.
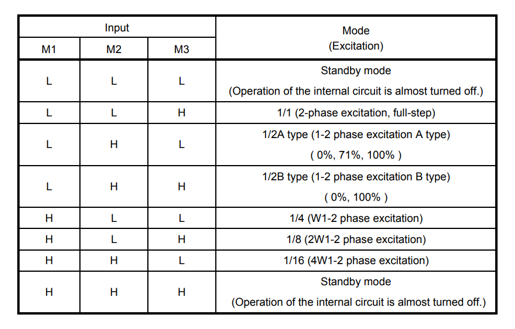
OPMERKING: Om de opwindende modus te wijzigen door M1, M2 en M3 te wijzigen, zorg er dan voor dat u M1 = M2 = M3 = L of M1 = M2 = M3 = H.
Standby -modus
De bewerkingsmodus beweegt naar de standby -modus onder de voorwaarde M1 = M2 = M3 = L of M1 = M2 = M3 = H. Het stroomverbruik wordt geminimaliseerd door alle bewerkingen uit te schakelen, behalve de bescherming van de werking.In de standby -modus is de uitgangsterminal Mo Hz.Standby -modus wordt vrijgegeven door de status van m1 = m2 = m3 = l en m1 = m2 = m3 = h naar andere status te wijzigen.Het ingangssignaal wordt niet geaccepteerd voor ongeveer 200 μs na het vrijgeven van de standby -modus.
Vervalmodus
Het opladen en ontladen van een stroom in de PWM -modus vereist meestal ongeveer vijf cycli in OSCM.De 40 procent snelle vervalmodus wordt geïnitieerd door verval te induceren binnen de laatste twee cycli van de snelle vervalmodus, waarbij de verhouding van 40 procent consistent vast blijft.De relatie tussen de hoofdklokfrequentie (FMCLK), de OSCM -frequentie (FOSCM) en de PWM -frequentie (FCHOP) wordt als volgt getoond:
foscm = 1/20 × fmclk
FCHOP = 1/100 × FMCLK
Wanneer ROSC = 51KΩ, de hoofdklok = 4MHz, OSCM = 200 kHz, de frequentie van PWM (FCHOP) = 40 kHz.
Eerste modus
Wanneer reset wordt gebruikt, zijn de fasestromen als volgt.
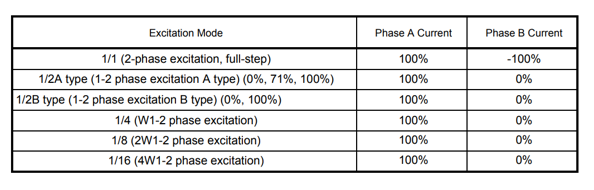
De huidige richting wordt als volgt gedefinieerd.
OUT1A → OUT2A: voorwaartse richting
OUT1B → OUT2B: Vooruitgang
Toepassing van TB6600HG
Hieronder staan hieronder enkele toepassingen van TB6600HG.
• achterlichten
• Gebouwen
• Grote buitenled display
• Alternatief voor HID -lichten
• Industriële high-bay lichten
• Grote formaat LED -achtergrondverlichting
• LED -achtergrondverlichting weergeven
• Camera-compatibele smartphones
• Step-up of Step-Down Driver Topologies
Algemene fouten en oplossingen van TB6600HG
Het volgende geeft een aantal veel voorkomende fouten over TB6600HG en hun oplossingen om u te helpen snel actie te ondernemen bij het tegenkomen van fouten en de normale werking van het apparaat te beschermen.
Falen één: oververhitting van de chauffeur
De TB6600HG -chip zelf is te heet, waarschijnlijk vanwege overmatige belasting of slechte warmtedissipatieomstandigheden.
Oplossing: verbetering van de warmtedissipatie
We moeten koellichamen of ventilatoren toevoegen aan de chip en de motor van de bestuurder om ervoor te zorgen dat ze tijdens het werken volledig warmte kunnen afwisselen.Tegelijkertijd moeten we de omgeving rond de chip van de bestuurder en de motor goed geventileerd houden om oververhitting te voorkomen.
Falen twee: motor roteert in de verkeerde richting
Nadat de motor het aandrijfsignaal heeft ontvangen, is de rotatierichting niet in lijn met de verwachte, het kan zijn dat het besturingssignaal verkeerd is of dat de aandrijfchip niet correct is geconfigureerd.
Oplossing: controleer het besturingssignaal
We moeten zorgvuldig de besturingssignalen controleren die naar de TB6600HG zijn verzonden om ervoor te zorgen dat het richtingregelsignaal en het pulssignaal correct zijn.Als een microcontroller wordt gebruikt om de signalen te verzenden, controleer dan de programmacode en PIN -configuratie.
Falen drie: motor kan niet roteren
De motor reageert niet na ontvangst van het aandrijfsignaal, het kan zijn dat de chip van de bestuurder niet goed werkt of dat er een probleem is met de verbinding tussen de motor en de chip van de bestuurder.
Oplossing: controleer de voeding en verbinding
We moeten ervoor zorgen dat de voeding van de TB6600HG normaal is en dat de verbinding tussen de motor en de chip van de bestuurder solide is.We controleren de spanning en stroom in het circuit met behulp van een multimeter om ervoor te zorgen dat ze zich in het normale bereik bevinden.
Falen vier: ernstige motorverwarming
De motor genereert overmatige warmte tijdens het bedrijf, wat kan worden veroorzaakt door overmatige stroom of slechte warmtedissipatie.
Oplossing: pas de huidige instelling aan
Als de motor ernstig warmte genereert, kunnen we proberen de uitgangsstroom van de chip -chip te verminderen.Door de huidige instellingspen van TB6600HG aan te passen, kunnen we de grootte van de uitgangsstroom effectief beperken, die op zijn beurt de last op de motor vermindert en stabiele en veilige werking van de motor zorgt.
Veelgestelde vragen [FAQ]
1. Wat is het bedrijfstemperatuurbereik van TB6600HG?
De bedrijfstemperatuur van TB6600HG varieert van -30 ° C tot 85 ° C.
2. Wat is TB6600HG?
TB6600HG is een type stappenmotor driver, ontworpen om stappenmotoren te besturen in verschillende toepassingen zoals CNC -machines, 3D -printers, robotica en automatiseringssystemen.
3. Wat zijn de belangrijkste kenmerken van TB6600HG?
TB6600HG-functies omvatten instelbare motortroom, stappenresolutie-instellingen, ingebouwde oververhitting bescherming en opto-geïsoleerde ingangen voor signaalregeling.