MPU-6050 in actie: praktische gids voor instellingen, configuratie en ruisbeheer
Catalogus
Inleiding tot MPU-6050
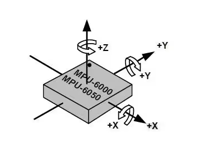
MPU-6050 is 's werelds eerste geïntegreerde 6-assige bewegingsverwerkingscomponent, die een 3-assige gyroscoop, 3-assige versnellingsmeter en een schaalbare digitale bewegingsprocessor (DMP) integreert.Het doel om het te gebruiken is om de hellingshoek van het te gemeten object te verkrijgen (zoals een quadcopter, een evenwichtsauto) op de x-, y- en z -assen, dat wil zeggen de steekhoek, rolhoek en gierhoek.We hebben de zes gegevens van de MPU-6050 (drie-assige versnellingsadvertentie en drie-assige Angular-snelheid AD-waarde) gelezen via de I2C-interface.Na het verwerken van de houdingsfusie kunnen de pitch-, roll- en gierhoeken worden berekend.Als een directionele referentie voor meetwaarden is de definitie van de sensorcoördinaatrichting zoals weergegeven in de onderstaande figuur, die volgt op het principe van het rechtshandige coördinatensysteem (dat wil zeggen de rechterduim naar de positieve richting van de x-Axis, de wijsvinger wijst naar de positieve richting van de y-as en de middelvinger wijst naar de positieve richting van de z-as).
Met zijn toegewijde I2C-sensorbus kan de MPU-6050 input rechtstreeks van een externe 3-assige kompas ontvangen, wat een volledige 9-assige MotionFusion ™ -uitgang biedt.Het elimineert het discrepantieprobleem tussen de gecombineerde gyroscoop en versneller tijdlijn en vermindert de verpakkingsruimte aanzienlijk in vergelijking met oplossingen voor meerdere componenten.Wanneer aangesloten op een drie-assige magnetometer, is de MPU-60x0 in staat om volledige 9-assige bewegingsfusie-uitvoer te bieden aan de belangrijkste I2C- of SPI-poort (merk op dat de SPI-poort alleen beschikbaar is op de MPU-6000).
Alternatieven en equivalenten
• MPU-3300
• MPU-6000
• MPU-6500
Fabrikant van MPU-6050
De fabrikant van MPU-6050 is TDK.Nadat de twee oprichters van TDK, Dr. Yogoro Kato en Takei Takei, Ferrite in Tokyo, hebben uitgevonden, richtten ze Tokyo Denkikagaku Kogyo K.K. opIn 1935. Als een wereldwijd merk voor elektronica -industrie heeft TDK altijd een dominante positie behouden op het gebied van elektronische grondstoffen en elektronische componenten.De uitgebreide en innovatiegedreven productportfolio van TDK omvat passieve componenten zoals keramische condensatoren, aluminium elektrolytische condensatoren, filmcondensatoren, magnetische producten, hoogfrequente componenten, piëzo-elektrische en beschermingsapparaten, evenals sensoren en sensorsystemen (zoals temperatuur en druk,Magnetische en MEMS -sensoren), enz. Bovendien biedt TDK ook voedingen en energieapparaten, magnetische koppen en andere producten.De productmerken omvatten TDK, EPCO's, Invense, Micronas, Tronics en TDK-Lambda.
Intern blokdiagram van MPU-6050
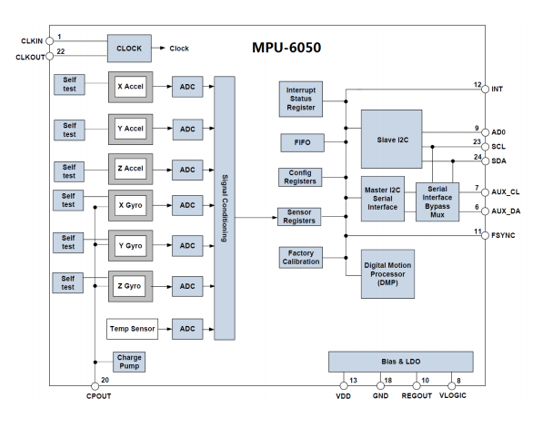
Onder hen zijn SCL en SDA de IIC-interfaces die zijn verbonden met de MCU, en de MCU bestuurt de MPU-6050 via deze IIC-interface.Er is ook een IIC -interface, namelijk aux_cl en aux_da.Deze interface kan worden gebruikt om externe slave-apparaten, zoals magnetische sensoren, te verbinden om een sensor van negen as te vormen.Vlogic is de IO -poortspanning.Deze pin kan minimaal 1,8 V ondersteunen.We verbinden het meestal rechtstreeks met VDD.AD0 is de adresbesturingspen van de Slave IIC -interface (verbonden met de MCU).Deze pin regelt het laagste stukje van het IIC -adres.Als het is verbonden met GND, is het IIC-adres van MPU-6050 0x68;Als het is verbonden met VDD, is het 0x69.Houd er rekening mee dat het adres hier niet het laagste stukje gegevensoverdracht bevat (het laagste bit wordt gebruikt om lees- en schrijfbewerkingen weer te geven).Op de MWbalancedStc15 is AD0 verbonden met GND, dus het IIC-adres van de MPU-6050 is 0x68 (exclusief het laagste bit).
Initialiseer de IIC -interface
MPU-6050 gebruikt IIC om te communiceren met STC15, dus we moeten eerst de SDA- en SCL-gegevenslijnen initialiseren die zijn aangesloten op MPU-6050.
Reset MPU-6050
Deze stap herstelt alle registers in de MPU-6050 naar hun standaardwaarden, die worden bereikt door 1 tot bit 7 van het Power Management Register 1 (0x6b) te schrijven.Na reset wordt het Power Management Register 1 hersteld naar de standaardwaarde (0x40), en dit register moet vervolgens worden ingesteld op 0x00 om de MPU-6050 te wekken en in een normale werkstatus te plaatsen.
Stel het volledige bereik van de hoeksnelheidsensor (gyro) en versnellingssensor in
In deze stap stellen we het volledige bereik (FSR) van de twee sensoren in via het Gyroscope Configuration Register (0x1B) en respectievelijk het Acceleration Sensor Configuration Register (0x1C).Meestal hebben we het volledige bereik van de gyroscoop ingesteld op ± 2000DPS en het volledige bereik van de versnellingsmeter tot ± 2G.
Stel andere parameters in
Hier moeten we ook de volgende parameters configureren: interrupts uitschakelen, de AUX I2C-interface uitschakelen, FIFO uitschakelen, de gyroscoop bemonsteringssnelheid instellen en het digitale low-pass filter (DLPF) configureren.Omdat we geen interrupts gebruiken om gegevens in dit hoofdstuk te lezen, moet de interruptfunctie worden uitgeschakeld.Tegelijkertijd, omdat we de AUX I2C -interface niet gebruiken om andere externe sensoren te verbinden, moeten we deze interface ook sluiten.Deze functies kunnen worden bestuurd via het interrupt enable Register (0x38) en het gebruikersbesturingsregister (0x6a).MPU-6050 kan FIFO gebruiken om sensorgegevens op te slaan, maar we hebben deze niet in dit hoofdstuk gebruikt, dus alle FIFO-kanalen moeten worden gesloten.Dit kan worden bestuurd via het FIFO Enable Register (0x23).Standaard is de waarde van dit register 0 (dat wil zeggen FIFO is uitgeschakeld), dus we kunnen de standaardwaarde rechtstreeks gebruiken.De bemonsteringssnelheid van de gyroscoop wordt geregeld door het Sampling Rate Divider Register (0x19).Normaal gesproken stellen we deze bemonsteringssnelheid in op 50. De configuratie van het digitale low-pass filter (DLPF) wordt voltooid via het configuratieregister (0x1A).Over het algemeen zullen we DLPF instellen op de helft van de bandbreedte om gegevensnauwkeurigheid en responssnelheid in evenwicht te brengen.
Configureer de systeemklokbron en schakel de hoeksnelheidssensor en versnellingssensor in
De instelling van de systeemklokbron is afhankelijk van het Power Management Register 1 (0x6b), waarbij de laagste drie bits van dit register de selectie van de klokbron bepalen.Standaard zijn deze drie bits ingesteld op 0, wat betekent dat het systeem de interne 8MHz RC -oscillator als klokbron gebruikt.Om de kloknauwkeurigheid te verbeteren, stellen we deze echter vaak in op 1 en selecteren we de x-as gyroscoop PLL als klokbron.Bovendien is het inschakelen van de hoeksnelheidsensor en versnellingssensor ook een belangrijke stap in het initialisatieproces.Beide bewerkingen worden geïmplementeerd via Power Management Register 2 (0x6c).Stel eenvoudig de overeenkomstige bit in op 0 om de overeenkomstige sensor te activeren.Na het voltooien van de bovenstaande stappen kan de MPU-6050 de normale werkstatus invoeren.Die registers die niet speciaal zijn ingesteld, zullen de standaardwaarden door het systeem worden voorgesteld.
Hoe werkt de MPU-6050?
Gyrosensor
De sensor is uitgerust met een gyro binnenin, die altijd parallel blijft aan de initiële richting vanwege het gyroscopische effect.Daarom kunnen we de richting en rotatiehoek berekenen door de afwijking van de gyro te detecteren vanuit de initiële richting.
Versnellingssensor
Een versnellingsmetersensor is een apparaat dat versnelling kan meten en werkt op basis van het principe van het piëzo -elektrische effect.Tijdens versnelling meet de sensor de inertiële kracht die op het massablok wordt uitgeoefend en berekent vervolgens de versnellingswaarde met behulp van de tweede wet van Newton.
Digital Motion Processor (DMP)
De DMP is een gegevensverwerkingsmodule in de MPU6050-chip die een ingebouwd Kalman-filteralgoritme heeft voor het verkrijgen van gegevens van de gyroscoop- en versnellingsmetersensoren en het verwerken van de uitvoerquaternions.Deze functie vermindert de werklast van de perifere microprocessor aanzienlijk en vermijdt het vervelende filtering- en gegevensfusieproces.
Aantekeningen:
Quaternions: Quaternions zijn eenvoudige supercomplexnummers.Complexe getallen zijn samengesteld uit reële getallen plus de denkbeeldige eenheid I, waarbij i^2 = -1.
Waar wordt MPU-6050 gebruikt?
• Speelgoed
• Handset en draagbaar gaming
• Bewegingsgebaseerde gamecontrollers
• BlUrfree ™ -technologie (voor video/stilstaand beeldstabilisatie)
• AirSign ™ -technologie (voor beveiliging/authenticatie)
• InstantSTure ™ IG ™ gebaarherkenning
• draagbare sensoren voor gezondheid, fitness en sport
• Motion-Enabled Game and Application Framework
• MotionCommand ™ -technologie (voor gebaren short-cuts)
• Locatiegebaseerde diensten, interessante punten en dode afrekening
• 3D-afstandsbedieningen voor DTV's met internetverbinding en settopboxen, 3D-muizen
• Touchanywhere ™ -technologie (voor "No Touch" UI Application Control/Navigation)
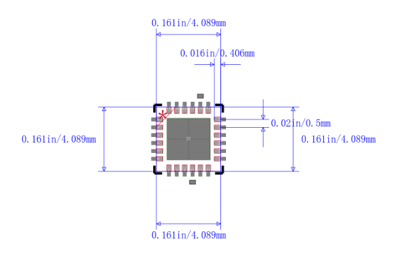
Pakket van MPU-6050
Hoe het geluid van MPU-6050 te verminderen?
We kunnen de volgende manieren nemen om het geluid van MPU-6050 te verminderen:
Gebruik gekalibreerde sensoren: kalibreren van de versnellingsmeter en gyroscoop van de MPU-6050 kan de vertekening en fout van de sensoren zelf elimineren, waardoor het effect van ruis wordt verminderd.Het kalibratieproces bestaat meestal uit twee fasen: statische kalibratie en bewegingskalibratie.
Hardwarefilteringsproces: het toevoegen van filtercondensatoren aan de stroomlijn van MPU-6050 kan de impact van de voeding van de voeding op de sensor verminderen.Ondertussen moeten we tijdens de PCB-lay-out proberen MPU-6050 weg te houden van potentiële interferentiebronnen, zoals hoogfrequente signaallijnen en krachtige componenten.
Softwarefilterverwerking: na het verzamelen van de onbewerkte gegevens van MPU-6050 kunnen we een softwarefilterlink toevoegen om de initiële gegevens vooraf te verwerken om door ruis geïnduceerde interferentie te elimineren.Veelgebruikte softwarefiltermethoden omvatten gemiddelde filtering, mediane filtering, Kalman -filtering, enzovoort.
Gebruik intern laagdoorlaatfilter: MPU-6050 heeft een intern geïntegreerd digitaal laagdoorlaatfilter, dat kan worden gebruikt om hoogfrequente ruis te verminderen door de afsnijfrequentie in te stellen.In het bijzonder kunnen we de afsnijfrequentie van het digitale filter instellen door het configuratieregister van de MPU-6050 te wijzigen om de hoogfrequente ruis veroorzaakt door A/D-bemonstering te elimineren.
MPU-6050-gebaseerde bewegingstrajectberekening
De MPU-6050 is een zes-assige versnellingsmeter en gyroscoopsensor die kan worden gebruikt om de beweging en houding van objecten te meten.De berekening van de bewegingstraject op basis van MPU-6050 kan worden gerealiseerd door de volgende stappen:
De eerste stap is om de sensorgegevens te lezen.We moeten de versnellingsmeter en gyroscoopgegevens van de MPU-6050-sensoren lezen met behulp van geschikte stuurprogramma's en bibliotheekfuncties.Deze gegevens worden meestal uitgevoerd in een digitaal formaat, dus wat conversie- en kalibratiewerk is vereist om ze om te zetten in werkelijke metingen in fysieke eenheden.
De tweede stap is om de versnelling te berekenen.Eerst moeten we de gegevens van de versnellingsmeter verwerken om de versnelling van het object in elke as af te leiden.Vervolgens moeten we, om de snelheid en verplaatsing van het object in elke as te berekenen, de versnellingsgegevens integreren.Numerieke integratietechnieken, zoals de methode van Euler of de Lunger-Kutta-methode, worden vaak in dit proces gebruikt om de nauwkeurigheid van de verplaatsingsberekeningen te waarborgen.
De derde stap is om de hoeksnelheid te berekenen.Met behulp van gyroscoopgegevens kan de hoeksnelheid van het object in elke as worden berekend.Nogmaals, deze gegevens moeten worden gekalibreerd en geconverteerd om de hoeksnelheid in werkelijke fysieke eenheden te verkrijgen.
De vierde stap is om de rotatie te berekenen.Door de hoeksnelheidsgegevens te integreren, kan de rotatiehoek van het object in elke as worden berekend.Dit kan worden gedaan met behulp van numerieke integratietechnieken zoals de methode van Euler of de Longe-Kutta-methode om de hoek te berekenen.
De vijfde stap is om de gegevens samen te voegen.We combineren de gegevens van versnellingsmeters en gyroscopen om volledige houding en positioninformatie van het object te verkrijgen.Dit kan worden gedaan met behulp van algoritmen zoals op quaternion gebaseerde attitude-oplosser of Euler-hoekoplosser.
De zesde stap is om de resultaten te visualiseren.We converteren het berekende objectbewegingstraject in een reeks punten in een 3D -coördinatensysteem en geven het weer met behulp van geschikte visualisatietools voor een meer intuïtief begrip van het bewegingstraject van het object en de attitudeveranderingen.
Veelgestelde vragen [FAQ]
1. Hoe nauwkeurig is MPU6050?
De verkregen resultaten vertoonden voldoende nauwkeurigheid van minder dan 1 % en betrouwbaarheid, waardoor de juiste dimensionering van de liftas en de hoge normen van de liftindustrie werd gewaarborgd.
2. Hoe lees ik gegevens van MPU6050?
Om de interne MPU6050 -registers te lezen, verzendt de master een startconditie, gevolgd door het I2C -slave -adres en een schrijfbit, en vervolgens het registeradres dat wordt gelezen.
3. Waar wordt MPU6050 gebruikt?
Bij draagbare gezondheidsopnames, fitness-tracking-apparaten.In drones en quadcopters wordt MPU6050 gebruikt voor positiecontrole.Gebruikt bij het beheersen van robotarm.Handgebaarbesturingsapparaten.
4. Is MPU6050 een IMU?
Het MPU6050 IMU-sensorblok leest gegevens van de MPU-6050-sensor die is aangesloten op de hardware.Het blok gaat versnelling, hoeksnelheid en temperatuur uit langs de assen van de sensor.
5. Wat is de verwerking van MPU6050?
Dit is de ingebouwde processor van MPU6050 die de gegevens combineert die afkomstig zijn van de versnellingsmeter en gyroscoop.De DMP is de sleutel tot het gebruik van de MPU6050 en wordt later in detail uitgelegd.Zoals bij alle microprocessors heeft de DMP firmware nodig om te worden uitgevoerd.
Over ons
ALLELCO LIMITED
Lees verder
Quick Inviry
Stuur een aanvraag, we zullen onmiddellijk reageren.

Diepgaande gids voor LM317: Inzicht in verstelbare spanningsregelaars
Op 2024/09/3
Inzicht in de TL431: een uitgebreide gids voor precisie shunt regelgevers
Op 2024/09/3
Populaire berichten
-

Wat is GND in het circuit?
Op 1970/01/1 3108
-

RJ-45 Connectorhandleiding: RJ-45 Connector kleurcodes, bedradingsschema's, R-J45-applicaties, RJ-45 datasheets
Op 1970/01/1 2672
-
Inzicht in de voedingsspanningen in elektronica VCC, VDD, VEE, VSS en GND
Op 0400/11/15 2211
-

Vezelconnectortypen: SC versus LC en LC vs MTP
Op 1970/01/1 2182
-

Vergelijking tussen DB9 en RS232
Op 1970/01/1 1802
-

Wat is een LR44 -batterij?
Elektriciteit, die alomtegenwoordige kracht, doordringt stilletjes elk aspect van ons dagelijks leven, van triviale gadgets tot levensbedreigende medische apparatuur, het speelt een stille rol.Het is echter geen gemakkelijke taak om deze energie echt te begrijpen, vooral hoe deze op te slaan en efficiënt uit te voeren.Het is tegen deze achtergrond dat dit artikel zich zal concentreren op een type...Op 1970/01/1 1774
-
Inzicht in de basisprincipes: inductantieweerstand en capaciteit
In de ingewikkelde dans van elektrotechniek staat een trio van fundamentele elementen centraal: inductantie, weerstand en capaciteit.Elk draagt unieke eigenschappen die de dynamische ritmes van elektronische circuits bepalen.Hier beginnen we aan een reis om de complexiteit van deze componenten te ontcijferen, om hun verschillende rollen en praktische toepassingen binnen het enorme elektrische ...Op 1970/01/1 1728
-

CR2430 Batterij uitgebreide gids: specificaties, toepassingen en vergelijking met CR2032 -batterijen
Wat is CR2430 -batterij?Voordelen van CR2430 -batterijenNormCR2430 -batterijtoepassingenCR2430 equivalentCR2430 vs CR2032Batterij CR2430 maatWaar moet u op letten bij het kopen van de CR2430 en equivalentenGegevensblad PDFVeelgestelde vragen Batterijen zijn het hart van kleine elektronische apparaten.Onder de vele beschikbare typen spelen muntencellen een cruciale rol, vaak aangetroffen in rekenma...Op 1970/01/1 1676
-
Wat is RF en waarom gebruiken we het?
Radiofrequentie (RF) -technologie is een belangrijk onderdeel van moderne draadloze communicatie, waardoor gegevensoverdracht over lange afstanden mogelijk maakt zonder fysieke verbindingen.Dit artikel duikt in de basis van RF, waarin wordt uitgelegd hoe elektromagnetische straling (EMR) RF -communicatie mogelijk maakt.We zullen de principes van EMR, de creatie en controle van RF-signalen en hun b...Op 1970/01/1 1670
-
Uitgebreide gids voor HFE in transistors
Transistoren zijn cruciale componenten in moderne elektronische apparaten, waardoor signaalversterking en -controle mogelijk worden.Dit artikel duikt in de kennis rond HFE, inclusief hoe u een HFE -waarde van een transistor kunt selecteren, hoe HFE te vinden en de winst van verschillende soorten transistoren.Door onze verkenning van HFE krijgen we een dieper inzicht in hoe transistoren werken en h...Op 5600/11/15 1632
Heet onderdeelnummer
-

04023U1R0BAT2A
KYOCERA AVX
CAP CER 1PF 25V NP0 0402
EP1SGX25FF1020C7
Altera
IC FPGA 607 I/O 1020FBGA
RT0402DRD073K3L
YAGEO
RES SMD 3.3K OHM 0.5% 1/16W 0402
RFM-0505S
Recom Power
DC DC CONVERTER 5V 1W
MC14024BDG
onsemi
IC BINARY COUNTER 7-BIT 14SOIC
IXTK250N10
IXYS
MOSFET N-CH 100V 250A TO264
TRSF3243IPWR
Texas Instruments
IC TRANSCEIVER FULL 3/5 28TSSOP
C5750X7R2A105K230KM
TDK Corporation
CAP CER 1UF 100V X7R 2220
VI-2W0-EY
Vicor Corporation
DC DC CONVERTER 5V 50W
MOC8102SD
onsemi
OPTOISOLATOR 5.3KV TRANS 6-SMD
DDTA144VUA-7-F
Diodes Incorporated
TRANS PREBIAS PNP 200MW SOT323
HMC732LC4B
Analog Devices Inc.
IC OSC VCO W/BUFFER AMP 24SMD
AOK53S60
Alpha & Omega Semiconductor Inc.
MOSFET N-CH 600V 53A TO247
T55B107M6R3C0070
Vishay Sprague
CAP TANT POLY 100UF 6.3V 1411
OPA2137P
Burr Brown
OPA2137 LOW COST FET-INPUT OPERA
MCP9843T-BE/MC
Micrel / Microchip Technology
IC TEMP SENSOR DGTL 8-DFN
SN65LVPE502RGER
Texas Instruments
IC REDRIVER USB 3.0 2CH 24VQFN
ADM202EARUZ-REEL
Analog Devices Inc.
IC TRANSCEIVER FULL 2/2 16TSSOP -

TL1451ACPWR
Texas Instruments
IC REG CTRLR MULT TOP 16TSSOP
TE28F800B5B90
Rochester Electronics, LLC
FLASH, 1MX8, 90NS, PDSO48
HSP303D-TR
Conexant
CONEXANT HSP30 HSP PCI MODEM IC
LTC7804IUD#TRPBF
Analog Devices Inc.
LOW IQ SYNCH BOOST CONTROLLER
LBM2016TR22J
Taiyo Yuden
FIXED IND 220NH 520MA 200MOHM SM
ADM7150ARDZ-3.3
Analog Devices Inc.
IC REG LINEAR 3.3V 800MA 8SOIC
GRM1555C1H3R3CZ01D
Murata Electronics
CAP CER 3.3PF 50V C0G/NP0 0402
TL072CP
onsemi
IC OPAMP JFET 2 CIRCUIT 8DIP
NRS5020T100MMGJ
Taiyo Yuden
FIXED IND 10UH 1.45A 144MOHM SMD
UCC27517AQDBVRQ1
Texas Instruments
IC GATE DRVR LOW-SIDE SOT23-5
BU4243G-TR
Rohm Semiconductor
IC SUPERVISOR 1 CHANNEL 5SSOP
HI9P5701K-5
Renesas Electronics America Inc
IC ADC 6BIT FLASH 18SOIC
0805B225K250CT
Walsin Technology Corporation
CAP CER 2.2UF 25V X7R 0805
LM3404MA
Texas Instruments
IC LED DRIVER RGLTR PWM 1A 8SOIC
IDT79RV4640-150DU
Renesas Electronics America Inc
IC MPU MIPS-I 150MHZ 128QFP
VCA2617RHBT
Texas Instruments
IC VARIABLE GAIN 2 CIRC 32VQFN
AD7715ARUZ-3
Analog Devices Inc.
IC ADC 16BIT SIGMA-DELTA 16TSSOP
02013A2R7CAT2A
KYOCERA AVX
CAP CER 2.7PF 25V C0G/NP0 0201 -

GRM2196P2A2R6CD01D
Murata Electronics
CAP CER 2.6PF 100V P2H 0805
MAX5033DUSA
Analog Devices Inc./Maxim Integrated
IC REG BUCK ADJ 500MA 8SOIC
0603N101J500LT
Walsin Technology Corporation
CAP CER 100PF 50V C0G/NP0 0603
TPS2115ADRBR
Texas Instruments
IC OR CTRLR SRC SELECT 8SON
VE-2W4-EY
Vicor Corporation
DC DC CONVERTER 48V 50W
SIR158DP-T1-GE3
Vishay Siliconix
MOSFET N-CH 30V 60A PPAK SO-8
LTC4270AIUKG#PBF
Analog Devices Inc.
IC POE CNTRL 12 CHANNEL 52QFN
ADS7824U
Texas Instruments
IC ADC 12BIT SAR 28SOIC
XC6209F332DR-G
Torex Semiconductor Ltd
IC REG LINEAR 3.3V 300MA 6USPB
SP4082EEN-L
MaxLinear, Inc.
IC TRANSCEIVER HALF 1/1 8SOIC
2SC2412-S
Yangjie Technology
Transistors - Bipolar (BJT) - Si
MAX6126A30+T
Analog Devices Inc./Maxim Integrated
IC VREF SERIES 0.06% 8UMAX
SRP4020TA-R47M
Bourns Inc.
FIXED IND 470NH 8A 14 MOHM SMD
SKY65014-70LF
Skyworks Solutions Inc.
IC AMP DBS 100MHZ-6GHZ SOT89-4
SMK316BJ102MF-T
Taiyo Yuden
CAP CER 1000PF 630V X5R 1206
EMK316BJ106KL-TR
Taiyo Yuden
CAP CER 10UF 16V X5R 1206
ACS120-7SH
STMicroelectronics
TRIAC SENS GATE 700V 2A IPAK
MAX992EUA
Analog Devices Inc./Maxim Integrated
IC COMPARATOR 2 GEN PUR 8UMAX