L298N Motor stuurprogramma's: functies, circuitdiagrammen en toepassingen
Catalogus
Inleiding tot L298N
L298N is een verticale pakketversie van L298.Het is een dual-channel motorduurprogramma's met volledige brug die een hoge spanning en hoge stroom kan accepteren.De werkspanning kan 46V bereiken en de maximale uitgangsstroom is 4A.Bovendien heeft L298N ook twee inschakelsterminals.Met deze besturingsterminals kan de werkmodus van het circuit dynamisch worden aangepast door de aanboord trui aan te sluiten en los te koppelen zonder te worden verstoord door het ingangssignaal.De L298N is uitgerust met een logische stroomingang, waardoor het interne logische circuitgedeelte bij lage spanning kan werken.Tegelijkertijd kan het ook een logische spanning van 5V extern uitvoeren.Om schade aan de spanningsstabiliserende chip te voorkomen, wordt het sterk aanbevolen om een externe 5V -interface voor onafhankelijke voeding te gebruiken.
L298N regelt de I/O -ingangsterminal op de hoofdbesturingschip en past de uitgangsspanning rechtstreeks door de voeding aan om de voorwaartse, omgekeerde en stop van de motor te realiseren.Normaal gesproken kan L298N rechtstreeks relais (vierweg), solenoïden, solenoïde kleppen, twee DC-motoren en één steppermotor (tweefasen of vierfase) aandrijven.
Alternatieven en equivalenten:
• E-L298N
• L298hn
• LM18298T
Functionele kenmerken van L298N
Logica -invoercompatibiliteit: de logische input van L298N is compatibel met TTL-, CMOS- en andere logische niveaus.
Oververhitting bescherming: L298N heeft de beschermingsfunctie oververhit.Wanneer de chiptemperatuur te hoog is, zal deze de uitgang automatisch verbreken.
Ingebouwde gratis polariteitsdiode: L298N heeft een ingebouwde gratis polariteitsdiode, die kan worden gebruikt voor het remmen van DC-motoren.
Grote stroomuitgang: L298N kan een grote uitgangsstroom bieden en is geschikt voor sommige toepassingen die een grote rijstroom vereisen.
Dubbele H-Bridge-structuur: L298N integreert een dubbele H-Bridge-structuur, die de besturing en snelheid van twee DC-motoren of stappenmotoren kan regelen.
L298N circuitdiagram
Het circuitdiagram van L298N is als volgt:
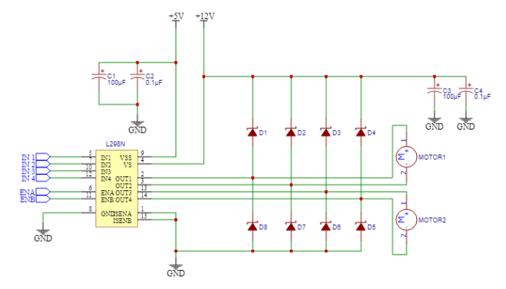
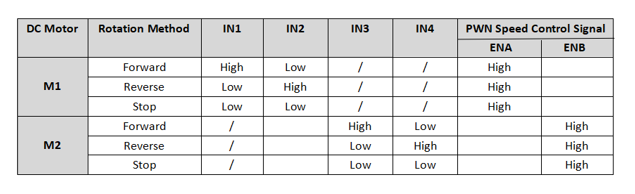
OUT1, OUT2 en OUT3, OUT4 zijn verbonden met Motor1, Motor2;In1, in2, in3, in 4 pins van de microcontroller om toegang te krijgen tot het besturingsniveau, om de motor vooruit en achteruit te regelen;ENA, ENB verbonden met de regeling van de enable -terminal, om de snelheid van de motor te regelen.Het L298N -besturingslogisch relatiediagram is als volgt:
Wat betreft de motorsnelheidsregeling, hebben we de PWM -snelheidsregelatiemethode overgenomen.Het principe ligt in het realiseren van de snelheidsregeling door de geleidingstijd T van de schakelbuis in één cyclus te regelen.De gemiddelde spanning U over de motor tijdens een volledige cyclus T kan worden uitgedrukt als U = VCC × (T/T) = A × VCC.Waarbij, a = t/t, bekend staat als de duty cyclus en VCC de voedingsspanning vertegenwoordigt.De snelheid van de motor is evenredig met de spanning over de motor, terwijl de spanning over de motor evenredig is met de werkcyclus van de regelkolven.Daarom is er een evenredig verband tussen de snelheid van de motor en de duty -cyclus: hoe hoger de duty -cyclus, hoe sneller de snelheid van de motor.
Controlemethode van L298N
Wanneer we L298N gebruiken, moeten we controlesignalen invoeren naar In1, In2, In3 en In4 om de voorwaartse en omgekeerde rotatie en snelheid van de motor te regelen.Hier zijn verschillende besturingsmethoden:
PWM -besturingsmodus
De PWM -modus kan de snelheid van de motor effectief regelen.Wanneer we de PWM -modus gebruiken, moeten we de twee PIN's EN1 en EN2 gebruiken om de snelheid van de motor aan te passen.In het bijzonder, wanneer de EN1- en EN2 -pinnen op hoog niveau zijn, zal de motor normaal werken;Wanneer ze op een laag niveau zijn, stopt de motor niet meer.
Eenrichtingsmodus
Wanneer in1, in2, in3 en in4 tegelijkertijd hoog niveau zijn, roteert de motor naar voren;Wanneer twee invoerpoorten hoog niveau zijn en de andere twee invoerpoorten laag zijn, roteert de motor omkeersel.
Bidirectionele besturingsmodus
Bij gebruik van de bidirectionele besturingsmodus zijn In1 en In2 verantwoordelijk voor het regelen van motor 1, terwijl In3 en In4 verantwoordelijk zijn voor het regelen van motor 2. specifiek, wanneer In1 hoog niveau is en in2 laag is, zal de motor 1 vooruit draaien;Omgekeerd, wanneer in1 laag niveau is en In2 hoog niveau is, zal motor 1 omgekeerd roteren.Op dezelfde manier is de besturingslogica van In3 en In4 ook van toepassing op de voorwaartse en omgekeerde rotatiecontrole van motor 2.
Pin -diagram en functies van L298N
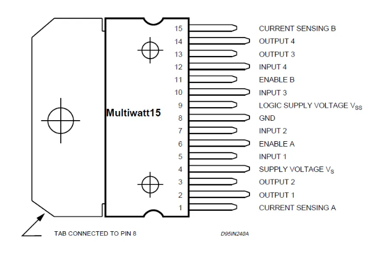
Power pin
VS: Supply -spanningsingang (tot 46V)
GND: Ground Pin
Logische besturingspen
In1, in2: gebruikt om de rotatierichting van motor 1 te regelen 1
In3, in4: gebruikt om de rotatierichting van motor 2 te regelen 2
Motorbesturingspen:
OUT1, OUT2: gebruikt om de richting van motor te regelen 1
OUT3, OUT4: gebruikt om de richting van motor 2 te regelen
Ena: schakel pin, gebruikt om de snelheid van motor te regelen 1
Enb: schakel pin, gebruikt om de snelheid van motor 2 te regelen 2
Hoe gebruik ik L298N?
Sluit de voeding aan: de voeding van de L298N -stuurprogramma's moet in het bereik van 12V tot 35V worden bewaard.In praktische toepassingen moeten we, om de stabiliteit van de voeding te waarborgen, mogelijk ook de voeding moeten filteren.
Sluit de motoren aan: we verbinden de twee motoren met de uitgangspennen van de L298N door de stuurprogramma en het bedieningsniveau wordt direct ingevoerd naar de motor via de L298N.
Control L298N: We gebruiken de besturingspoort (inschakelen, besturingspin) om de L298N te regelen.We moeten de status van de poort en bedieningspin inschakelen instellen bij het toewijzen van waarden.Deze statussen bepalen de niveaustatus van de L298N -uitvoer.Door deze toestanden te veranderen, kunnen we de voorwaartse en omgekeerde rotatie en snelheid van de motor effectief regelen.
Hoe gebruik ik PWM om de snelheid van de motor te reguleren?
Als we PWM willen gebruiken om de snelheid van de motor te reguleren, hebben we twee bedradingsmethoden:
Bedradingsmethode één (aanbevolen):
We verwijderen de jumperdop tussen kanaal enable en 5V, verbinden de schakelpen op de PWM -pin van Arduino en verbinden pinnen 1 en 2 met de twee normale pennen van Arduino.Op deze manier kunnen we de schakelaar van het kanaal door de PWM -pin regelen om de snelheid van de motor aan te passen;Door de niveaustatus van pennen 1 en 2 te regelen, kunnen we de rotatierichting van de motor regelen.Deze manier van bedrading vereist slechts het gebruik van één PWM -pin per kanaal, maar neemt twee normale pennen in beslag.Daarom moeten we in praktische toepassingen wegen en kiezen uit meerdere bedradingsmethoden op basis van het aantal pins dat beschikbaar is op de Arduino.
Bedradingsmethode twee (niet aanbevolen):
We verwijderen de jumper niet tussen kanaal enable en 5V, dus het kanaal blijft continu open.Vervolgens hebben we pinnen 1 en 2 verbonden met respectievelijk de twee PWM -interfaces van Arduino.Door de uitgangen die respectievelijk overeenkomen met deze twee pennen te regelen, kunnen we de motorrichting en snelheid regelen.Het is duidelijk dat deze bedradingsmethode meer PWM -pennen zal bezetten, omdat elk kanaal twee PWM -pennen vereist om te regelen.Deze methode bezet echter geen gemeenschappelijke pinnen.Daarom raden we niet aan om dit bedradingsschema te gebruiken wanneer PWM -pinbronnen strak zijn.
Waar wordt L298N gebruikt?
Elektrische voertuigen: L298N kan worden gebruikt om de aandrijfmotoren in elektrische voertuigen, zoals elektrische fietsen, scooters, enz.Stabiel rijden van elektrische fietsen.De rijder kan instructies naar de L298N verzenden door de handgreep of knoppen te bedienen, waardoor de uitgang van de motor wordt geregeld om de fietsaandrijving te maken volgens de wensen van de rijder.
Geautomatiseerde industriële apparatuur: op het gebied van industriële automatisering kan L298N worden gebruikt om de motoren van verschillende industriële apparatuur, zoals transportbanden, robotarmen, industriële robots, enz.Rotatiehoek en snelheid van de motor, waardoor de robotarm kan bewegen volgens een vooraf bepaald traject en een zeer nauwkeurige werking kan bereiken.Dit verbetert niet alleen de productie -efficiëntie, maar vermindert ook de productieverliezen veroorzaakt door operationele fouten.
Robottechnologie: L298N wordt vaak gebruikt in robotprojecten om de aandrijfmotor te besturen om de beweging en actie van de robot te realiseren.Industriële robots moeten vaak zwaar laden, zeer nauwkeurige werkzaamheden ondernemen en extreem hoge vereisten hebben aan drive-motoren.L298N biedt krachtige stroomondersteuning voor industriële robots met zijn uitstekende rijmogelijkheden en stabiliteit.Of het nu gaat om hantering, montage of inspectie, L298N kan ervoor zorgen dat industriële robots taken nauwkeurig en efficiënt voltooien.
Smart Home: in Smart Home Systems kan L298N worden gebruikt om de motoren van jaloezieën, gordijnen, deuren en andere apparatuur te regelen om geautomatiseerde controle te bereiken.Door te combineren met sensoren, kan huisapparatuur automatisch worden aangepast aan de verlichting, temperatuur en andere omstandigheden.
Zonne -trackingsysteem: in zonnestelsels kan L298N worden gebruikt om de kantelhoek van zonnepanelen te regelen om een zonne -trackingsysteem te implementeren.Door de besturing van L298N kan het zonnestrackingsysteem de positieveranderingen van de zon in realtime voelen en de kantelhoek van de zonnepanelen dienovereenkomstig aanpassen.Dit dynamische aanpassingsproces zorgt ervoor dat de zonnepanelen altijd de optimale hoek ten opzichte van de zon behouden, waardoor de efficiëntie van de energieverzameling van de zonnepanelen wordt verbeterd.
Veelgestelde vragen [FAQ]
1. Kan de l298n besturingssnelheid?
De L298N is een dubbele H-Bridge Motor Driver die tegelijkertijd snelheid en richtingregeling van twee DC-motoren mogelijk maakt.
2. Waarom werkt mijn L298N niet?
Het moet boven 4,5 V zijn voor de juiste werking van de L298.2. U verliest misschien 2,5 V over de L298.Misschien is er niet genoeg spanning meer om de motor te laten draaien.
3. Wat is de L298N?
De L298N Motor Driver is een controller die een H-brug gebruikt om de richting van de motoren en PWM gemakkelijk te regelen om de snelheid te regelen.Met deze module kunt u onafhankelijk twee motoren van maximaal 2A in beide richtingen beheren.De leveringsbereik kan variëren tussen 5V en 35V, genoeg voor de meeste DC -motorprojecten.
4. Kunnen we 4 motoren verbinden met L298N?
Het antwoord is ja en Nee. Het hangt af van hoe u de L298N -motorrijder gebruikt.De L298N oorspronkelijk ontworpen voor het besturen van twee DC -motoren of één steppermotor.Maar als u niet wilt dat elke motor achteruit draait, kunt u elke zijde van L298N -driver gebruiken om twee DC -motoren en in totaal 4 motoren te besturen.